ディーゼル微粒子捕集フィルター(DPF)に関する作業を行った後は、CarPortで**実測すす量(煤値)**を 新規に学習させる必要があります。これにより、エンジン制御ユニットが再びフィルターおよびセンサーの 実際の状態に基づいて計算するようになります。
このガイドは次のシナリオで使用します:
- 微粒子捕集フィルター(DPF)を交換した – 新しいフィルターは実質的にすすが付着していないため、実測すす量を再設定する必要があります。
- 微粒子捕集フィルター(DPF)を清掃した – 清掃後のフィルターは(ほぼ)すすが付着しておらず、従来の高い実測すす量はもはや合致しません。
- DPF差圧センサーを交換した – 新しいセンサーはゼロ点がわずかに旧センサーとずれているため、実測すす量を新しいセンサーを基準に再設定します。
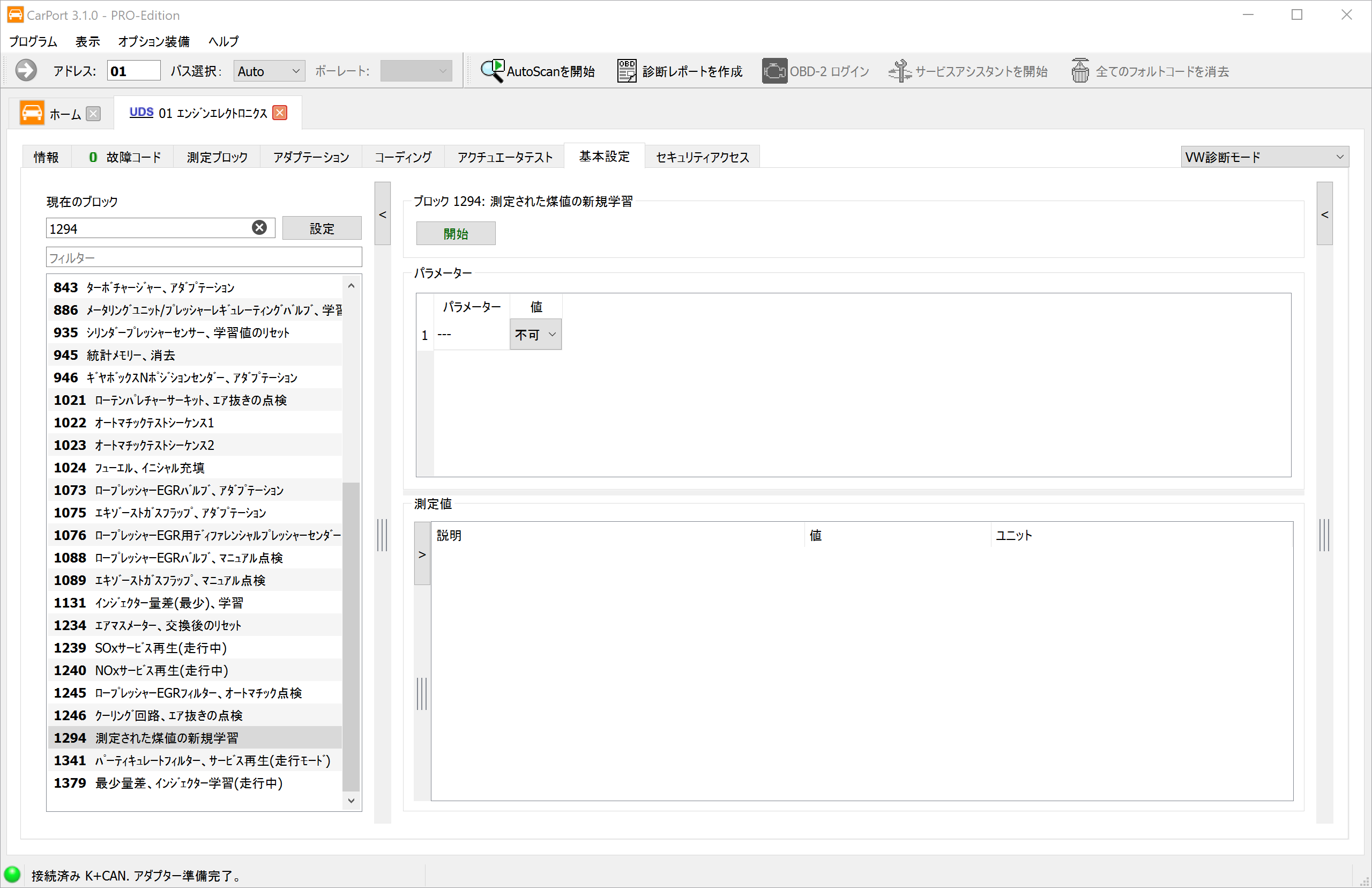
いずれの場合も手順は同一です。基本設定でブロック**「測定された煤値の新規学習」**を実行します。
ディーゼル微粒子捕集フィルター(DPF)に取り付けられた差圧センサーは、フィルターの 前後の圧力差を測定します。すすの堆積量が多いほど流動抵抗が大きくなり、差圧も高くなります。 エンジン制御ユニット(ECU)はこの値から**実測のすす量(煤値)**を求め、モデル計算による 算出値(負荷、回転数、エアマス量、排気温度、燃料消費から算出)と常時照合しています。
1. なぜ学習が必要なのか?
- 差圧センサーはすす堆積量を判定するための基準値を供給します。制御ユニットは(差圧から 求めた)実測すす量を、モデル計算による算出値と比較します。
- フィルター交換またはフィルター清掃の後は、フィルターが実際には(ほぼ)すすの付着していない 状態になっており、保存されている高い実測すす量はもはや合致しないため、低い初期値へ再設定する 必要があります。
- センサー交換の後は、新しいセンサーがゼロ点でわずかに旧センサーとずれています。学習を行うことで、 実測すす量が新しいセンサーを基準に再設定されます。
- 学習を行わないと、燃料消費の増加やオイル希釈を伴う再生(リジェネレーション)が頻発したり、 逆にDPFの過堆積によって出力低下やエンジン警告灯の点灯を招くおそれがあります。
⚠️ 混同しないこと: ブロック
1076「ロープレッシャーEGR用ディファレンシャルプレッシャー センサー」は別のセンサー(低圧EGR経路)に関するもので、DPF差圧センサーに使用する ブロックとしては正しくありません。
2. 前提条件
- 診断インターフェースが接続されていること(画面下部のステータスバーに例えば 「接続済み K+CAN. アダプター準備完了。」 と表示される)
- 実施した作業が完了していること:新しいまたは清掃したフィルターの取り付け、あるいは新しいセンサーの装着が済み、圧力ホースとコネクターが正しく確実に装着され密閉されていること
- イグニッションON、エンジンOFF – 排気の流れがない状態ではセンサーに差圧がかからず、 ゼロ点を正しく取得できます
- 車載電源電圧が安定していること(必要に応じて充電器を接続する)
- あらかじめエンジン制御ユニットの**故障メモリー(フォルトメモリー)**を消去しておくこと
3. 基本設定を開いてブロックを選択する
- 制御ユニット 01 – エンジンエレクトロニクス を選択します。
- 基本設定 タブに切り替えます。
- 項目 「測定された煤値の新規学習」 を選択します。
注意: エンジンやソフトウェアの状態によっては、ブロック番号がわずかに異なる場合があります。 基準となるのはブロック 「測定された煤値の新規学習」 です。
4. 学習を開始する
- 右上の 開始 をクリックします。
- 制御ユニットが学習を実行します。測定値 の領域で進行状況を確認できます。ステータスが 完了 もしくは 成功 と表示されるまで待ちます。
- その後イグニッションを OFF にし、制御ユニットが値を確実に取り込むよう、少なくとも 10秒間 待ちます。
💡 必要な条件が満たされていない場合(例:エンジンが回転している、電圧が低すぎる)、制御ユニットは 基本設定を中止します。手順2の条件を整えてから、再度開始してください。
5. 結果を確認する
- 故障メモリー(フォルトメモリー) を消去してから、再度読み出します。差圧関連または DPF関連の新しいフォルトコードが記録されていないことを確認します。
- 測定ブロック で実測すす量とモデル計算によるすす量が妥当な値かを確認します。 エンジン停止時は差圧が0に近い値になっているはずです。
- 短い試運転を行い(できれば診断機を接続したまま)、さまざまな負荷点で圧力値が妥当であること、 およびフォルトが再発しないことを確認します。
6. 背景:実測すす量とモデル計算すす量
制御ユニットはDPFの堆積量を、互いに独立した2つの経路から把握しています。
- 実測すす量: 差圧(差圧センサー G505)と排気の体積流量から算出されます。まさにこの値が センサーに直接依存しており、ブロック1294で新規に学習されます。
- モデル計算すす量: 運転データ(回転数、負荷、噴射量、温度)から計算により求められ、 センサーには依存しません。
両者の値が大きく乖離すると、制御ユニットはフォルトを記録します。新規学習を行うことで、実測値が フィルターおよびセンサーの実際の状態に再び整合するようになります。
7. 注意事項
- ホースとコネクターを点検する: よくある不具合の原因はセンサー自体ではなく、 すすで詰まった、折れた、または漏れのある圧力ホースやコネクターの腐食です。交換時に 併せて点検してください。
- 再生はいつ有効か? センサーの交換のみでは実際のすす堆積量は変わりません。サービス再生や 緊急再生が意味を持つのは、フィルターが実際に堆積している場合のみです。一方、フィルターの交換または 清掃の後は、フィルターが実際には(ほぼ)空の状態です。この場合に必要なのは実測すす量の再設定 だけであり、再生ではありません。
- 正しいセンサーを選ぶ: DPF差圧センサーは低圧EGR差圧センサー(ブロック
1076)でも 排気圧センサーでもありません。適合する部品番号に注意してください。 - 条件は制御ユニットが決める: どの値が表示されるか、どの前提条件が適用されるかは制御ユニットが 規定します。条件が満たされない場合、ルーチンは実行されません。
- フォルトが再発する場合は? 圧力ホース(亀裂、詰まり、接続の入れ違い)、コネクター接続と 配線、およびセンサーが正しく装着されているかを点検してください。
- 表示されないブロックがある場合: エンジン、ソフトウェアの状態、コーディングによっては、 すべてのブロックが表示されなかったり、名称がわずかに異なったりします。これは正常であり、 不具合ではありません。